Hierarchical Imitation Learning via Variational Inference of Control Programs
Roy Fox, Richard Shin, William Paul, Yitian Zou, Dawn Song, Ken Goldberg, Pieter Abbeel, and Ion Stoica
Infer to Control: Probabilistic Reinforcement Learning and Structured Control workshop (Infer2Control @ NeurIPS), 2018
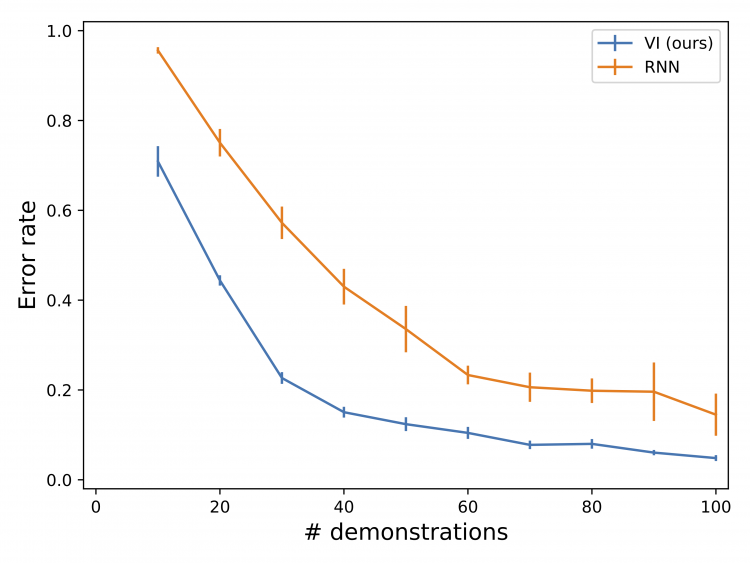
Autonomous controllers can be trained by imitation learning from demonstrations of the intended control. Hierarchical imitation learning in the parametrized hierarchical procedures (PHP) framework can reduce the required number of demonstrations by allowing each procedure to specialize in specific behavior and abstract away from transient state features. We propose a variational inference method for discovering the latent hierarchical structure in observation–action traces of teacher demonstrations. We train an inference model to approximate the posterior distribution of the latent call-stack of hierarchical procedures, and sample from it to guide the training of the hierarchical controller. Our method requires 40 demonstrations, less than half as many as end-to-end RNN training, to achieve 88% success rate in training the BubbleSort algorithm.