A Multi-Agent Control Framework for Co-Adaptation in Brain-Computer Interfaces
Josh Merel*, Roy Fox*, Tony Jebara, and Liam Paninski
27th Conference on Neural Information Processing Systems (NeurIPS), 2013
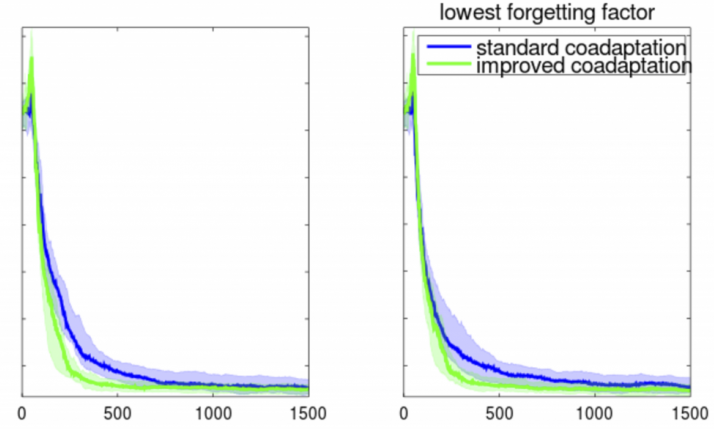
In a closed-loop brain-computer interface (BCI), adaptive decoders are used to learn parameters suited to decoding the user’s neural response. Feedback to the user provides information which permits the neural tuning to also adapt. We present an approach to model this process of co-adaptation between the encoding model of the neural signal and the decoding algorithm as a multi-agent formulation of the linear quadratic Gaussian (LQG) control problem. In simulation we characterize how decoding performance improves as the neural encoding and adaptive decoder optimize, qualitatively resembling experimentally demonstrated closed-loop improvement. We then propose a novel, modified decoder update rule which is aware of the fact that the encoder is also changing and show it can improve simulated co-adaptation dynamics. Our modeling approach offers promise for gaining insights into co-adaptation as well as improving user learning of BCI control in practical settings.