Robot Learning with Invariant Hidden Semi-Markov Models
Ajay Kumar Tanwani, Jonathon Lee, Michael Laskey, Sanjay Krishnan, Roy Fox, and Ken Goldberg
Perspectives on Robot Learning: Imitation and Causality workshop (Causal Imit. @ RSS), 2018
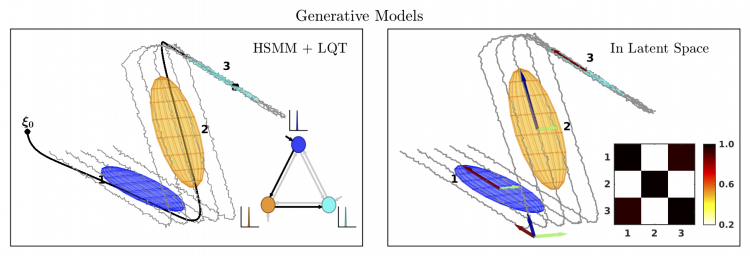
Generalizing manipulation skills to new situations requires extracting invariant patterns from demonstrations. For example, the robot needs to understand the demonstrations at a higher level while being invariant to the appearance of the objects, geometric aspects of objects such as its position, size, orientation, viewpoint of the observer in the demonstrations. In this paper, we learn a joint probability density function of the demonstrations with invariant formulations of hidden semi-Markov model, and smoothly follow the generated sequence of states with a linear quadratic tracking controller. We present parsimonious and Bayesian non-parametric online learning formulations of the HSMM to exploit the invariant segments (also termed as sub-goals, options or actions) in the demonstrations and adapt the movement in accordance with the external environmental situations such as size, position and orientation of the objects in the environment using a task-parameterized formulation. We show an application of robot learning from demonstrations in picking and placing an object while avoiding a moving obstacle.